Quelques exemples d'utilisation pratique
La suite MDS fourni des outils clé en main pour les ingénieurs désirant (i) analyser des modèles complexes et (ii) identifier ou construire des modèles de complexité maîtrisée, directement depuis des données issues d'expérimentations réelles et/ou de simulateurs complexes.
A titre d'illustration de la simplicité d'utilisation, quelques examples d'interface utilisateur depuis MATLAB® et Python sont présentées ci-après.
D'autres, plus détaillés, sont disponibles dans la documentation.
Quelques exemples
Approximation/identification de modèle dynamique linéaire, depuis des données fréquentielles
 Code MATLAB »
Code MATLAB » Code Python »
Code Python »
Estimation de stabilité depuis des données fréquentielles
Code MATLAB »Code Python »Estimation de stabilité depuis des données fréquentielles avec MATLAB
Ici, nous étudions la stabilité d'un système linéaire d'ordre 2, affecté par deux retards sur les variables internes du système, tau et r.
Le système résultant est dit de dimension infinie car il contient une infinité de singularités.
Ces systèmes sont particulièrement compliqués à analyser.
Le système considéré ici est représente un problème de congestion dans un réseau, et est détaillé et traité dans l'article [IEEE CSM, eq. (50)].
% Test model, congestion system G(s,tau,r)
A0 = [0 0; 1 0];
A1 = [0 -2; 0 0];
A2 = [0 1.75; 0 0];
B = [1; 0];
C = [0 1];
tauBnd = [0 1.4];
rBnd = [0 1.8];
G = @(s,tau,r) C*((s*eye(2)-A0-A1*exp(-s*tau)-A2*exp(-s*(tau+r)))\B);
A partir de la description de la fonction G, et plus particulièrement de l'évaluation de sa réponse fréquentielle, il est possible d'estimer la stabilité du système, grâce à la routine mdspack.fdstabest.
Dans le cas présent, nous évaluons la stabilité pour les combinaisons du couple de retard tau et r, de la façon suivante.
% Evaluation the stability of G for frozen (tau,r)
w = logspace(-2,1,200);
tau = linspace(tauBnd(1),tauBnd(2),31);
r = linspace(rBnd(1),rBnd(2),30);
for i1 = 1:numel(tau)
for i2 = 1:numel(r)
Gi = @(s) G(s,tau(i1),r(i2));
F = mdspack.freqresp(Gi,w);
[stab,Hr] = mdspack.fdstabest(w,F);
stabEst(i1,i2) = stab;
end
end
[X,Y] = meshgrid(r,tau);
figure, hold on
surf(X,Y,double(stabEst),'EdgeColor','none')
xlabel('$r$ [s]'); ylabel('$\tau$ [s]')
title('Stability region estimation of the delayed system')
colormap sky
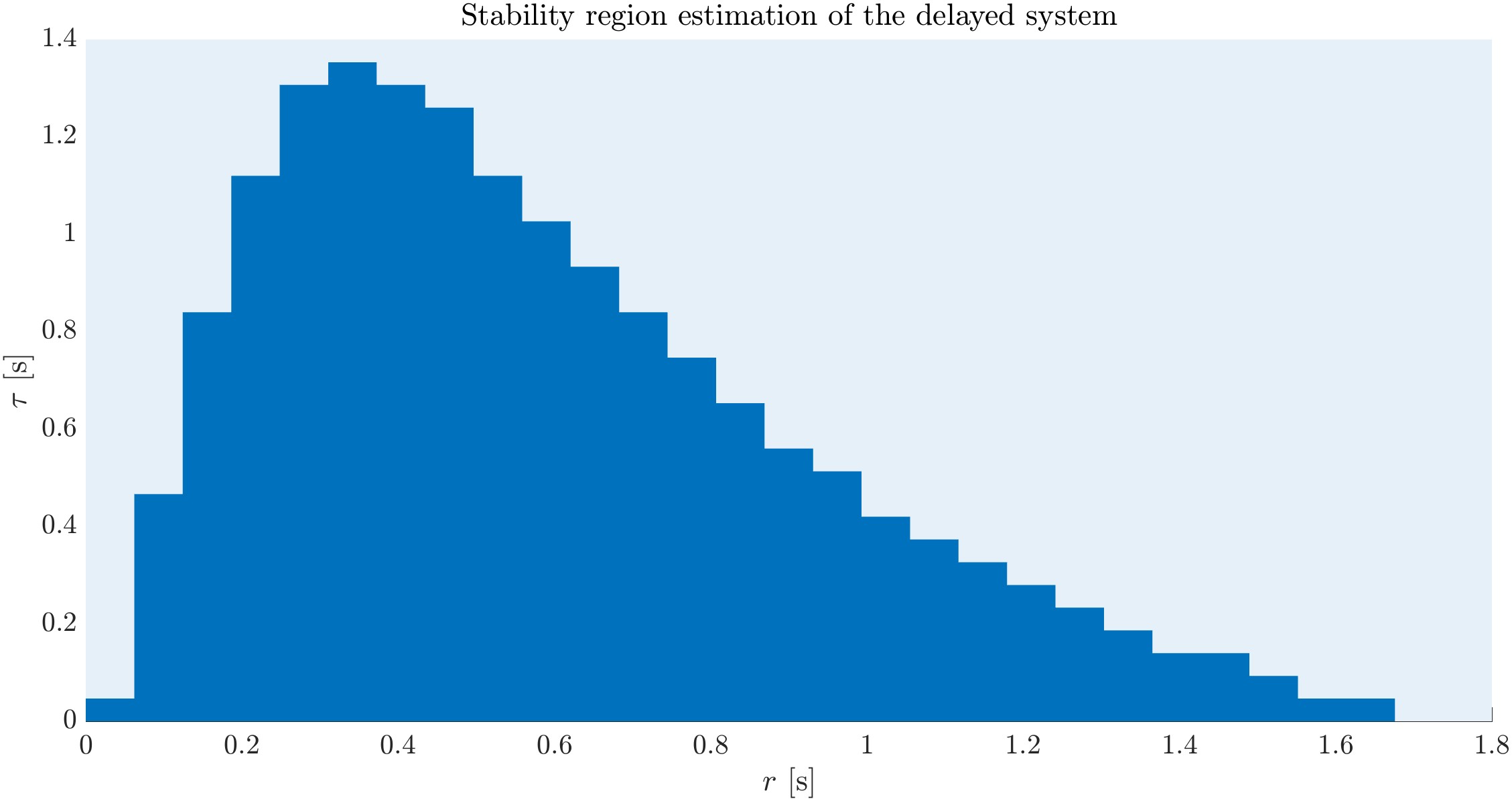
Cette double boucle permet de construire la matrice de stabilité stabEst, comprenant soit des 1 (pour les configurations stables) ou des 0 (pour les configurations instables).
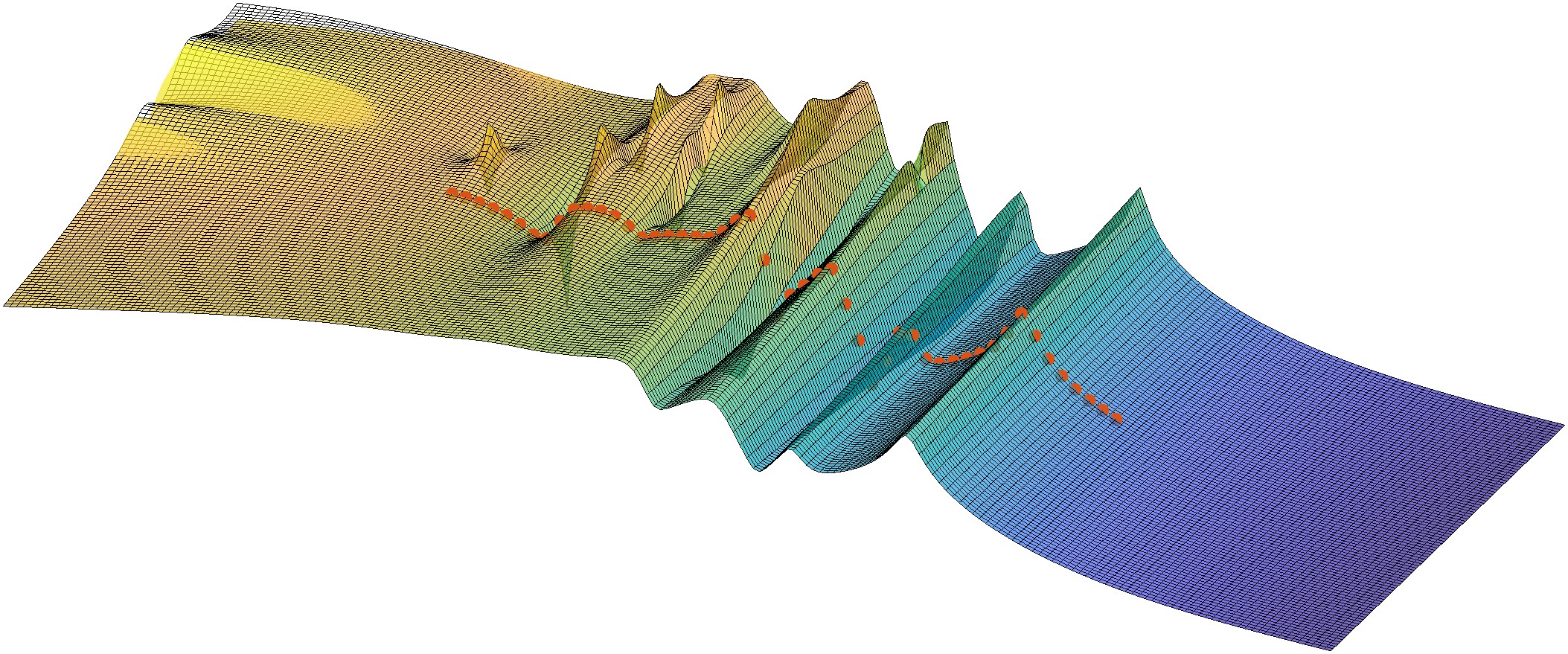
La figure ci-dessous montre la région de stabilité (bleu foncé) et d'instabilité (gris clair).
En comparant avec les résultats décrit dans [IEEE CSM, Figure 20], on constate une très forte similitude.
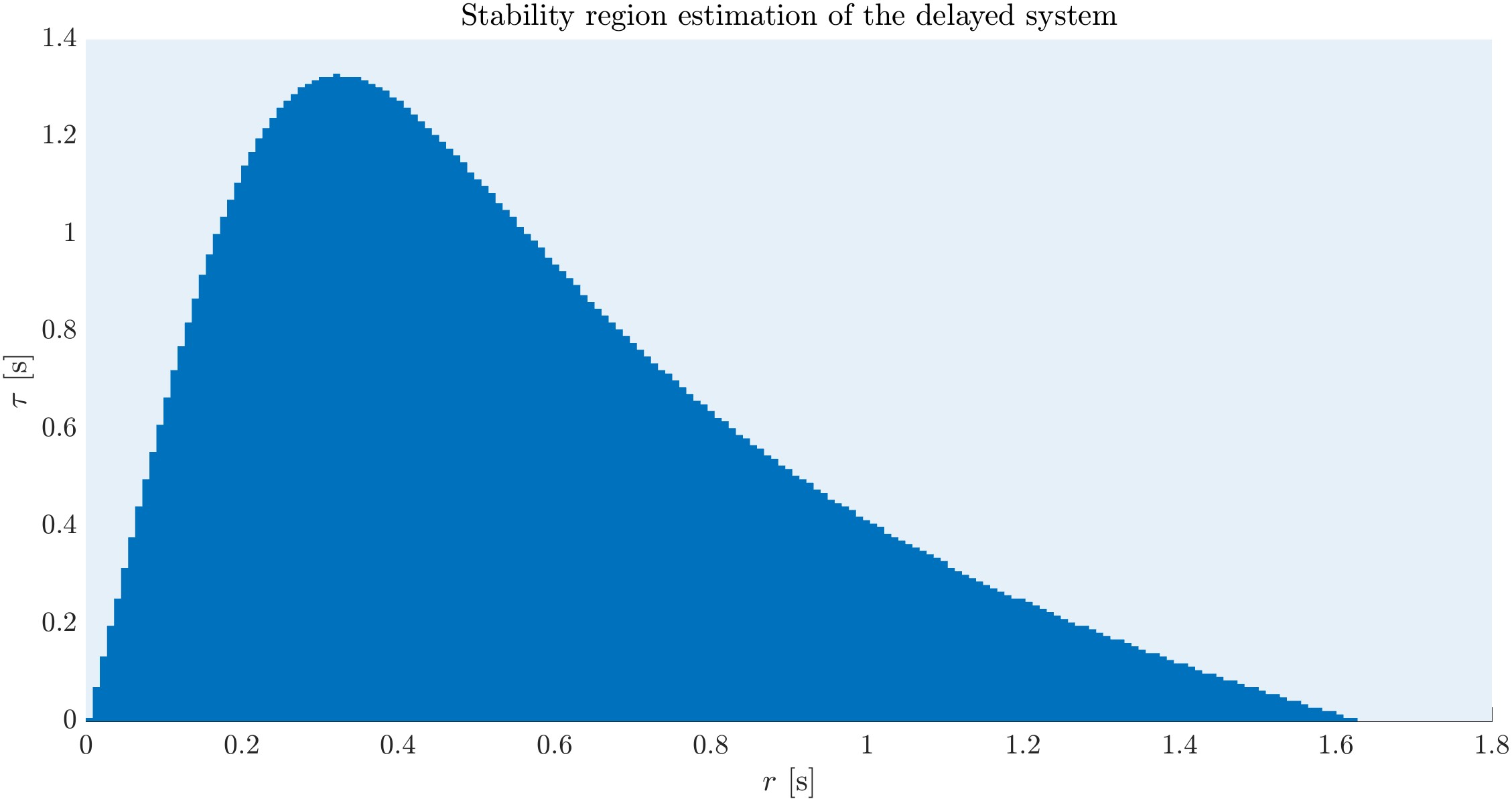
Si au lieu du maillage 31x30 utilisé ci-dessus, nous utilisons un maillage plus fin 301x300, nous obtenons la figure ci-après, extrêmement proche du résultat théorique illustré dans [IEEE CSM, Figure 20].
Enfin, il est également intéressant de comparer les résultats des modèles stables approchés, obtenus par mdspack.fdstabest, pour deux configurations distinctes, l'une stable l'autre instable.
En l'état nous choisissons de montrer le cas stable (tau=1,r=0.5) et instable (tau=1,r=0.6).
% Test model G(s,1,.5) and G(s,1,.6)
G1 = @(s) G(s,1,.5);
G2 = @(s) G(s,1,.6);
F1 = mdspack.freqresp(G1,w);
F2 = mdspack.freqresp(G2,w);
[stab1,Hr1] = mdspack.fdstabest(w,F1);
[stab2,Hr2] = mdspack.fdstabest(w,F2);
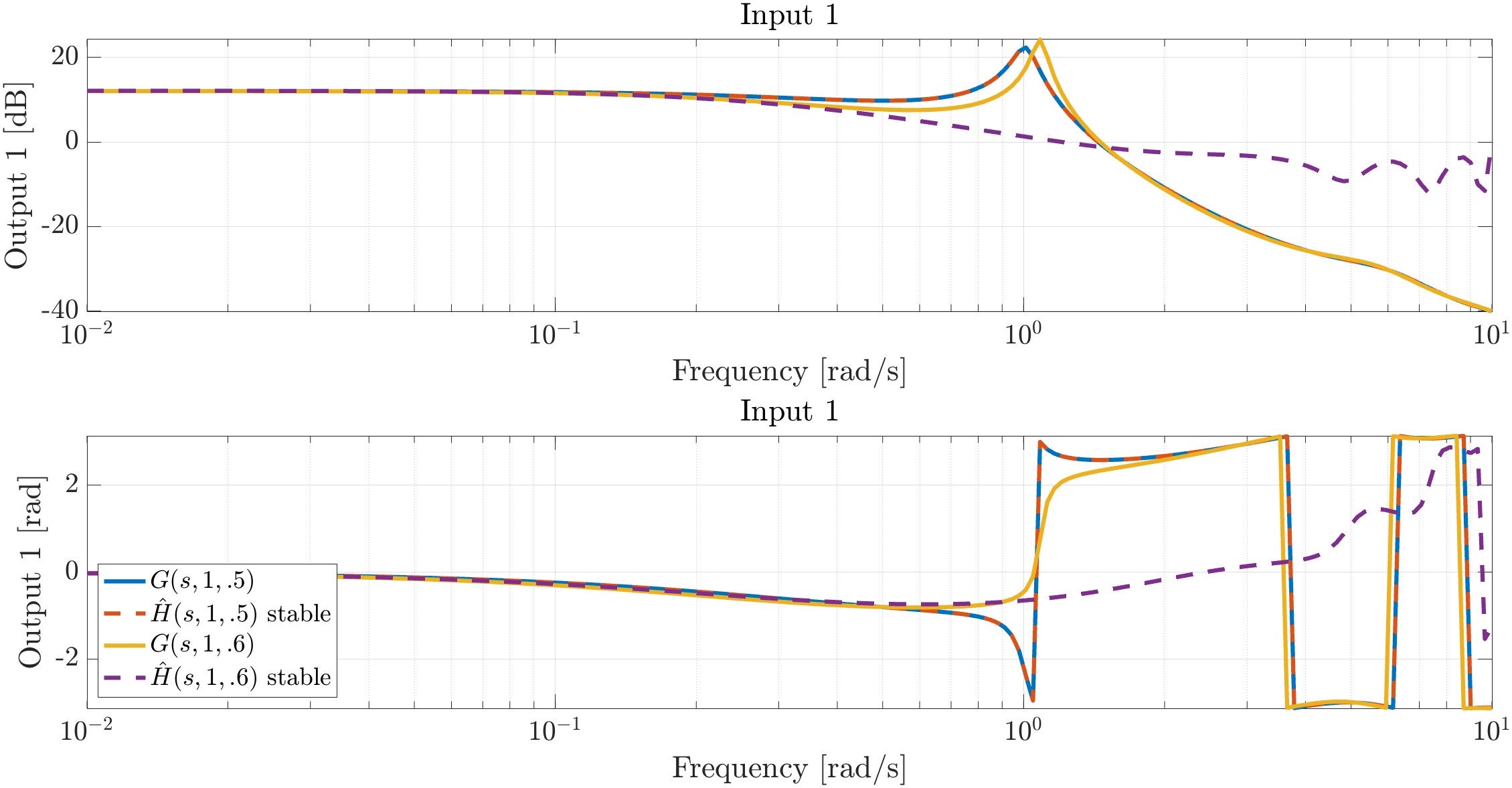
On note ici que la réponse fréquentielle de Hr1 (stable) est très proche de F1, qui est une configuration stable, G(s,1,.5).
En revanche, la réponse fréquentielle de Hr2 (stable) est très différente de F2, qui est une configuration instable, G(s,1,.6).
A noter que la méthode proposée peut également s'appliquer à des transerts bien plus complexes, incluant davantage de délais et surtout davantage de variables internes, ce qui la rend appliquable à un large spectre de problèmes pratiques.
[IEEE CSM] R. Sipahi, S-I. Niculescu, C.T. Abdallah, W. Michiels, K. Gu, "Stability and stabilization of systems with time delay", IEEE Control Systems Magazine 31(1), 38-65.
Approximation de modèle dynamique linéaire, depuis des données fréquentielles avec MATLAB
Ici, nous générons aléatoirement un système dynamique (stable) mono-entrée mono-sortie.
Ce système dynamique est décrit par une représentation d'état d'ordre 100, c'est à dire qu'il est décrit par 100 équations d'états et une équation de sortie.
Remarque: du fait de l'utilisation de la commande stabsep, quelques états peuvent être éliminés.
% Create an unknown model and compute its eigenvalues
G = stabsep(rss(200,1,1));
eigG = eig(G);
Ce système, considéré comme inconnu, mais nous considérons que nous pouvons l'évaluer.
Ici, il est échantillonné en fréquence, et plus particulièremenet, 50 fréquences de 1 rad/s à 100 rad/s, avec la fonction mdspack.freqresp (extension de freqresp de MATLAB).
Cette évaluation est équivalente à exciter le système par un signal temporel (riche en fréquence dans cet intervalle), puis à appliquer la transformée de Fourier.
% Compute the associated frequency domain set
w = logspace(0,2,50);
Gjw = mdspack.freqresp(G,w);
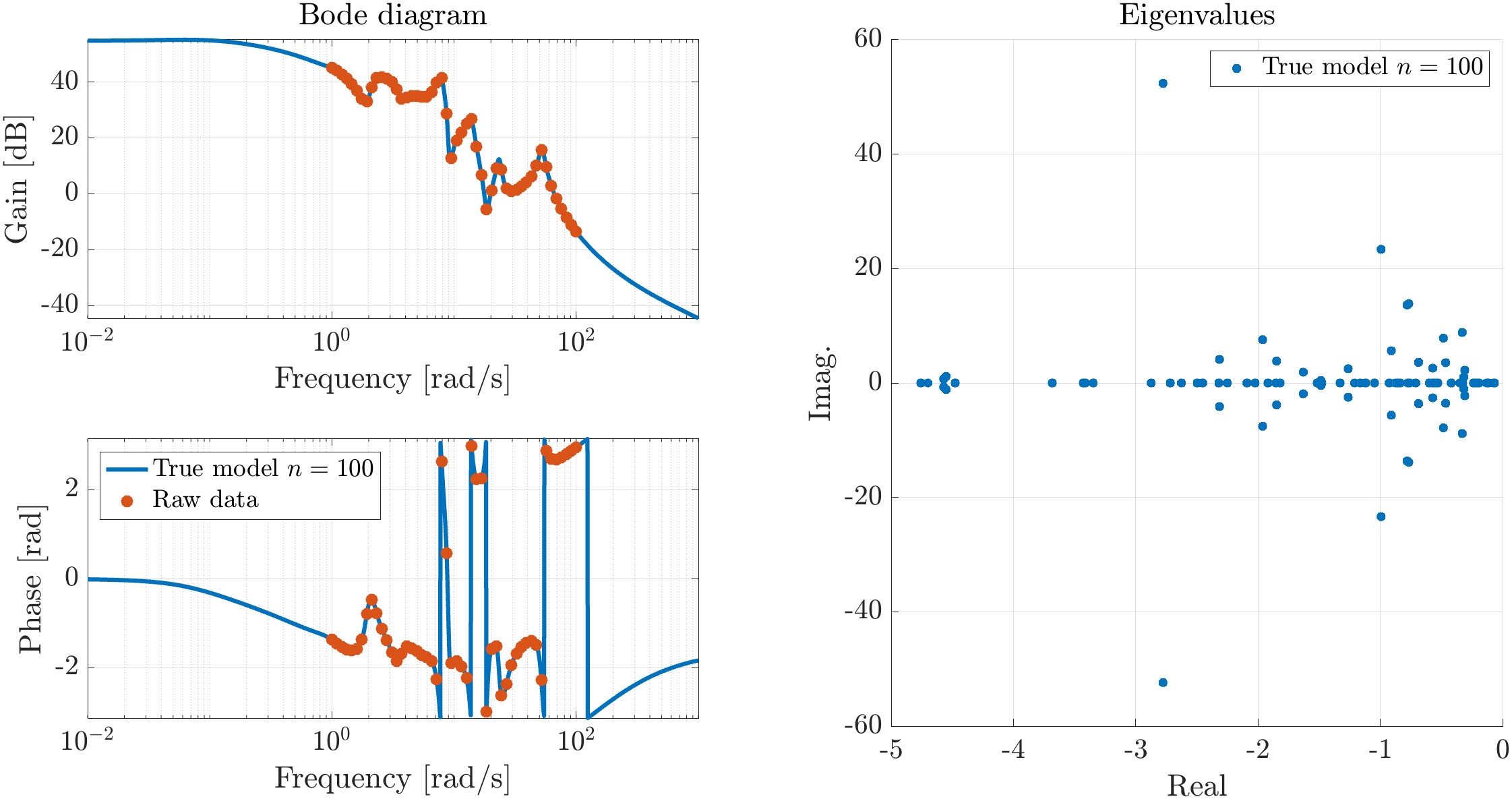
La figure ci-dessous illustre la réponse fréquentielle (diagrame de Bode - gain et phase) du système original (inconnu), ainsi que l'évaluation (les données) dont nous disposons. De plus, la figure de droite présente les valeurs propres du système original (également non connues).
Grâce à librairie MDSPACK et la fonction mdspack.loewner, il est possible de trouver une approximation rationnelle directement depuis les données.
Dans la mesure où l'approximant n'est pas nécessairement stable, il est également possible de le contraindre à l'être avec mdspack.sproj.
% Data interpolation with the Loewner method
[Gr1,info1] = mdspack.loewner(w,Gjw);
% Enforce identified model stability, and eigenvalues computation
opt.space = 'I';
Gr1 = mdspack.sproj(Gr1,opt);
eigGr1 = eig(Gr1);
Le diagramme de Bode et les valeurs propres du modèle initial et identifié sont donnés dans la figure suivante:
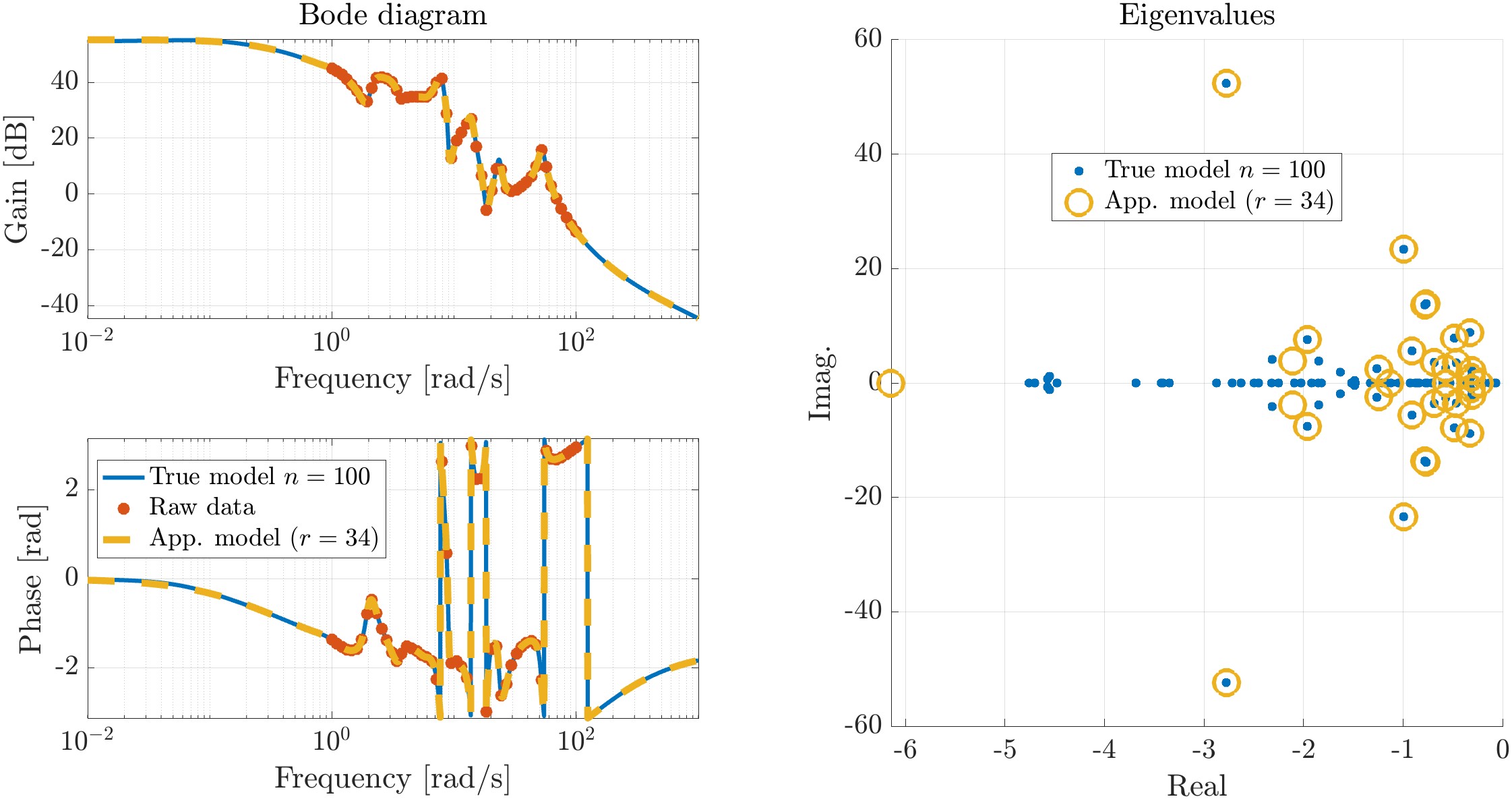
A noter que l'ordre du modèle (i.e. la compléxité) a été choisie automatiquement. Dans notre cas, le nombre de données ont suffit à retrouver le modèle avec une précision machine. Afin de simplifier son analyse, il est également possible de réduire davantage la compléxité du modèle de la manière suivante (ici nous cherchons une compléxité de 20 états).
% Reduce the model complexity
[Gr2,info2] = mdspack.loewner(w,Gjw,struct('target',20));
Gr2 = mdspack.sproj(Gr2,struct('space','I'));
eigGr2 = eig(Gr2);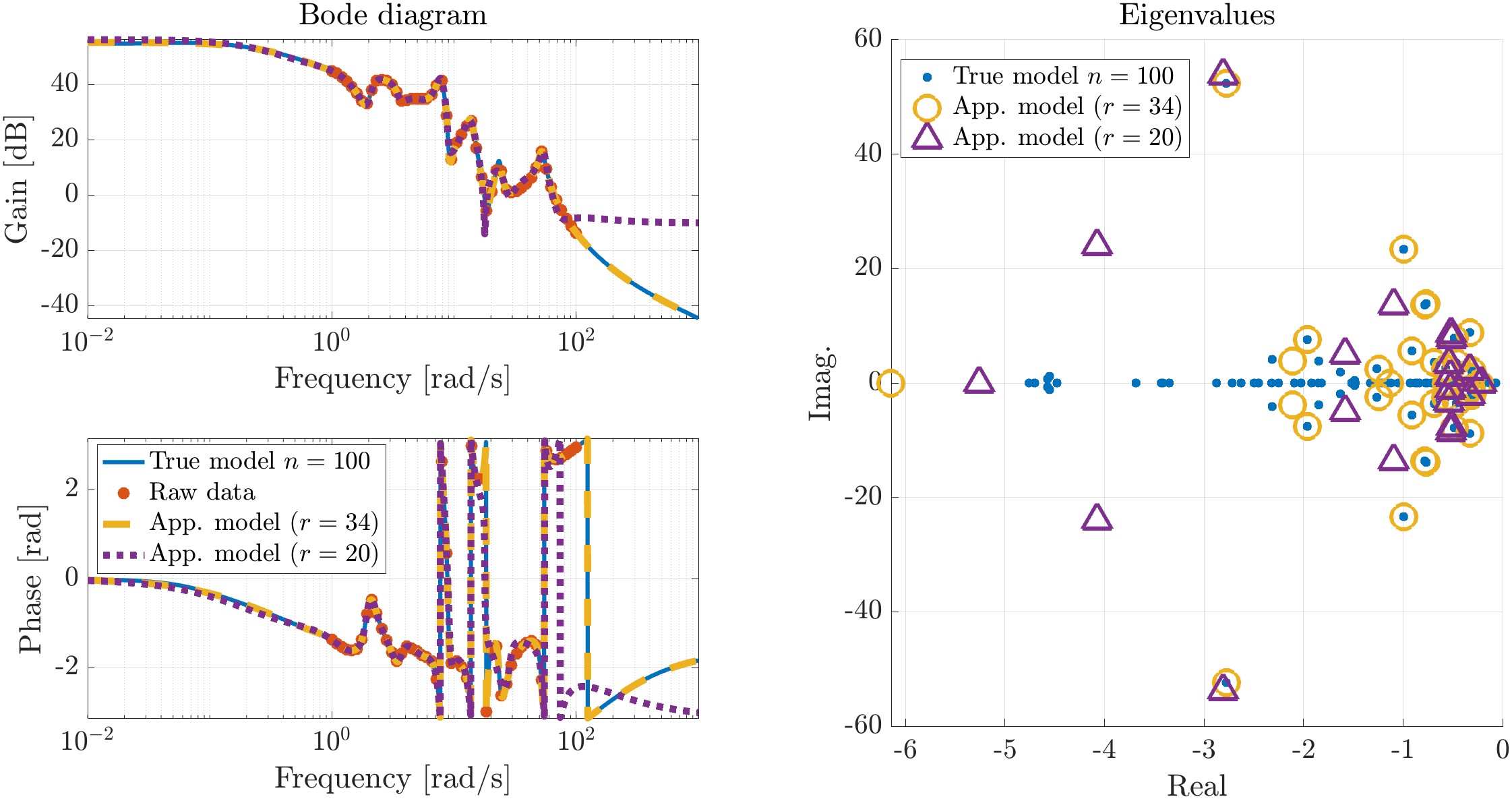
De la même manière, nous pouvons nous focaliser uniquement sur une zone fréquentielle, permettant de simplifier le modèle identifié, en gardant une bonne précision dans l'intervalle d'intérêt. Ici nous cherchons une bonne approximation en basses fréquences. Ceci est particulièrement intéressant pour simuler ou contrôler des sous-ensemble du système ou phénomène.
% Reduce over frequency band range
[Gr3,info3] = mdspack.loewner(w,Gjw,struct('w_band',[0 4]));
Gr3 = mdspack.sproj(Gr3,struct('space','I'));
eigGr3 = eig(Gr3);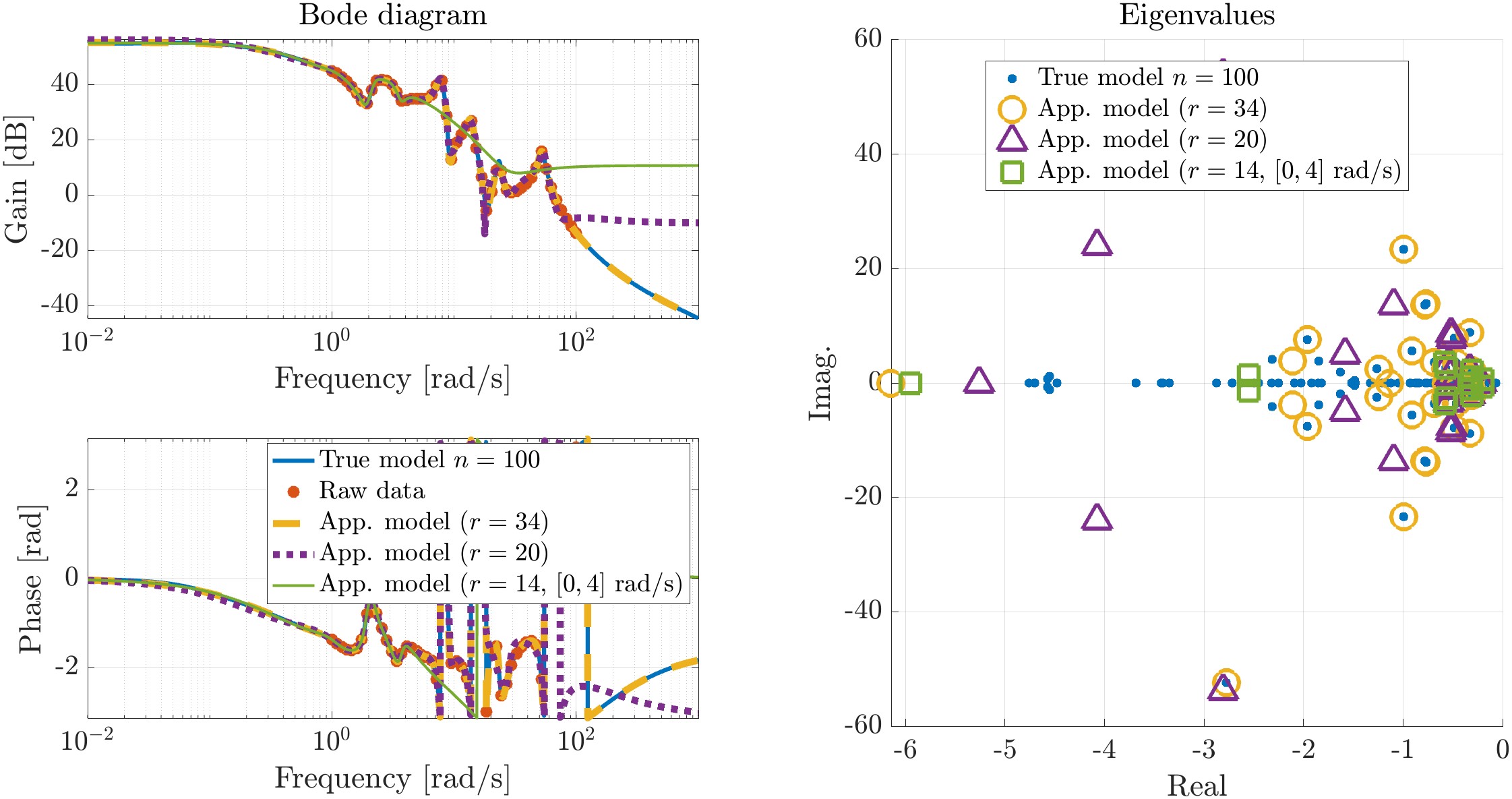
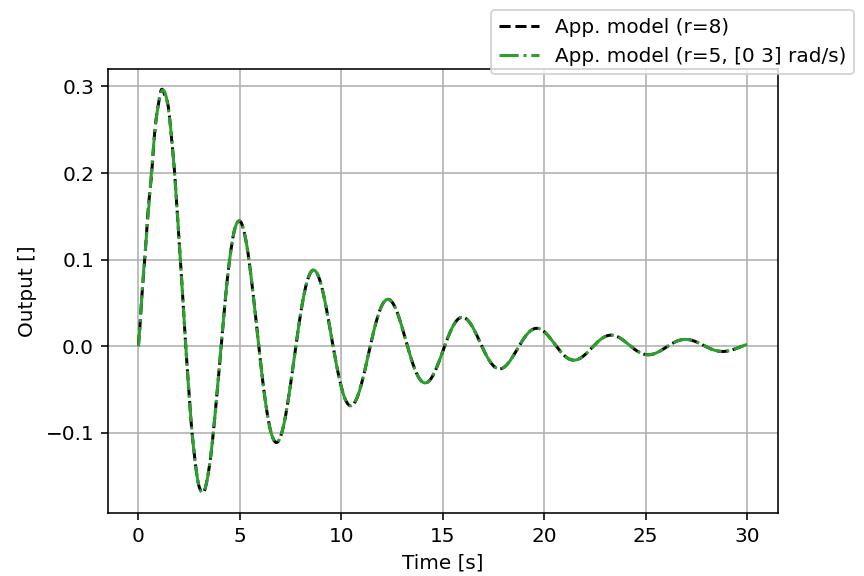
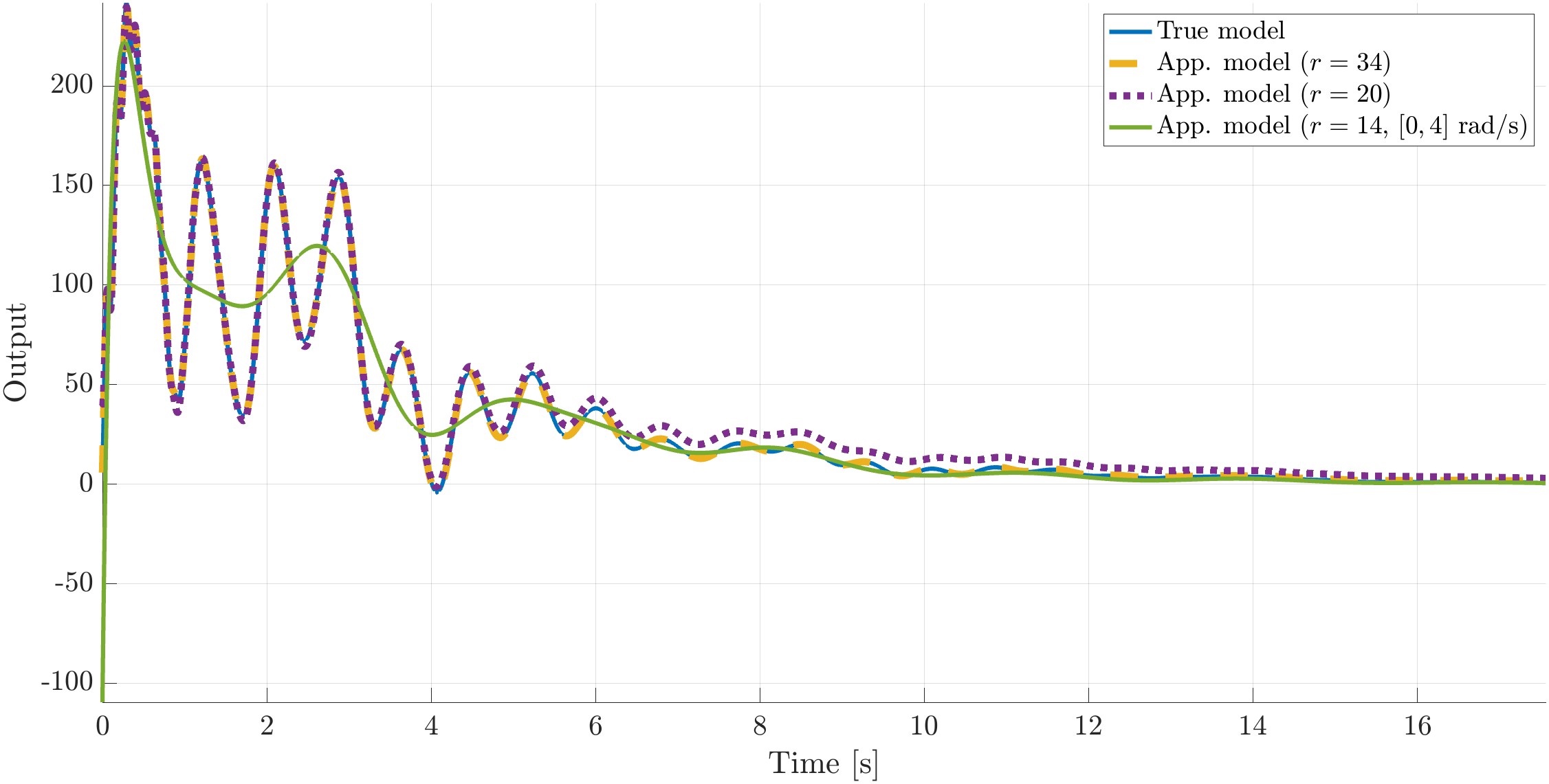
A présent, nous pouvons comparer les réponses impulsionnelles associées. On notera que le premier modèle capture parfaitement les dynamiques du système. Le second donne une approximation qui conserve la tendance et les oscilations. Le dernier, qui se focalise seulemnt sur les basses fréquences ne restitue que la tendance et exclut les oscillation autour des 1.3 Hz (ou env. 8 rad/s).
Approximation de modèle dynamique linéaire, depuis des données fréquentielles avec Python
Ici, nous générons un système dynamique (stable) de dimension infinie, mono-entrée mono-sortie. Ce système dynamique est décrit par une fonction de transfert, c'est à dire une fonction complexe qui lie une entrée à une sortie. Remarque: la fonction de transfert est dite de dimension infinie car elle est analytique et son dénominateur à une infinité de singularités (du fait cause du terme exponentiel, caractéristique des systèmes dit à retard).
% Create an unknown model
den = lambda s: (s**2 + s*np.exp(-4/5*s) + 1)
Hs = lambda s: (s**1/3)/den(s)#(s**1/3)/den(s)
Ce système est considéré comme inconnu, mais nous considérons que nous pouvons l'évaluer. Ici, il est échantillonné suivant la variable "s" de Laplace, le long de l'axe imaginaire, c'est à dire en fréquence. Plus particulièremenet, 15 fréquences de 0.1 rad/s à 31 rad sont calculées. Cette évaluation est équivalente à exciter le système par un signal temporel (riche en fréquence dans cet intervalle), puis à appliquer la transformée de Fourier.
% Compute the associated frequency domain set
n = 15
w = list(np.logspace(-.5,1,n))
data = [0 for i in range(n)]
for i in range(n):
data[i] = [[Hs(complex(0,w[i]))]]
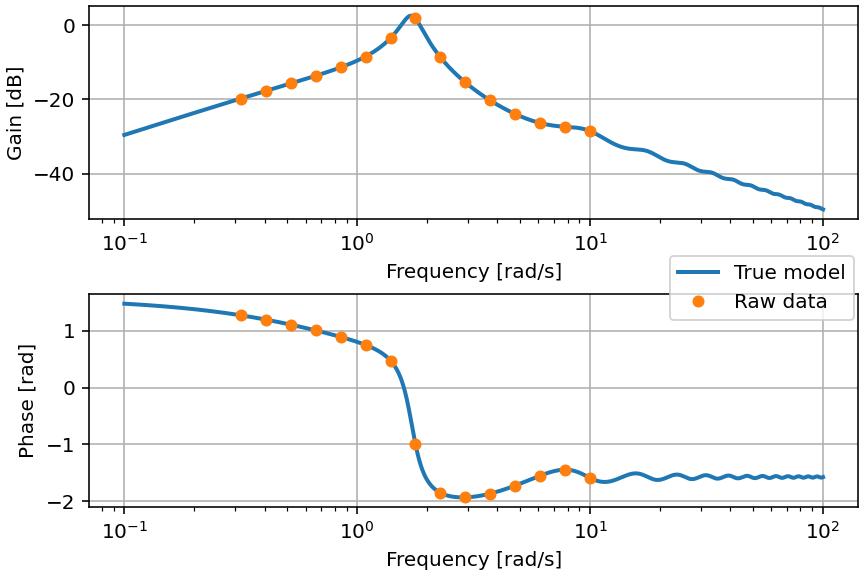
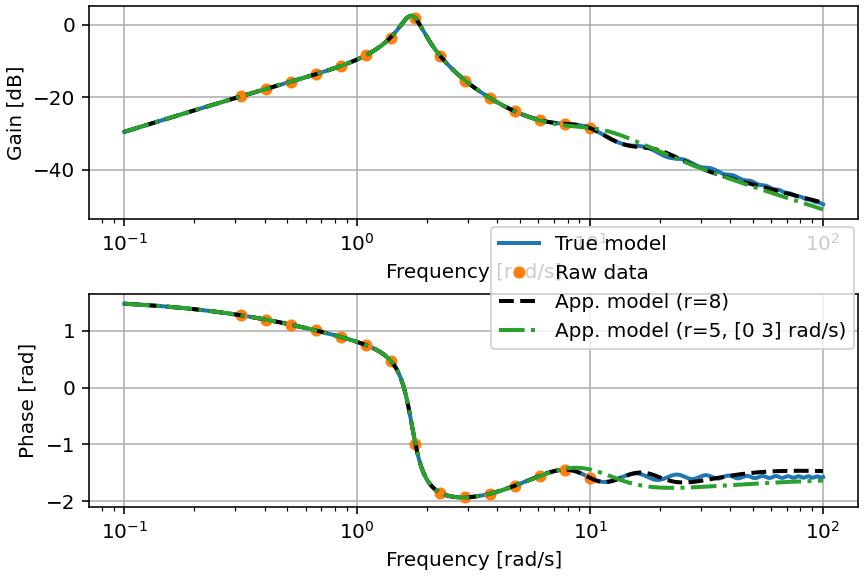
La figure ci-dessous illustre la réponse fréquentielle (diagrame de Bode - gain et phase) du système original (inconnu), ainsi que l'évaluation (les données) dont nous disposons. Il faut noter que la réponse que nous souhaitons approcher n'est pas rationnelle, et que les points dont nous disposons dans ce sont peu nombreux.
Grâce à librairie MDSPACK et la fonction mdspacky.loewner, il est possible de trouver une approximation rationnelle directement depuis les données.
Dans la mesure où l'approximant n'est pas nécessairement stable, il est également possible de le contraindre à l'être avec les options disponibles; ici stable=True.
Ensuite, la réponse fréquentielle est évaluée par mdspacky.ssfr.
% Data interpolation with the Loewner method
[A1, B1, C1, D1, E1] = mdspacky.loewner(w, data, stable=True)
Hjw1 = mdspacky.ssfr(A1, B1, C1, D1, E1, W)
eigHr1 = linalg.eigvals(A1, E1)
Le diagramme de Bode du modèle initial et identifié sont donnés dans la figure suivante:
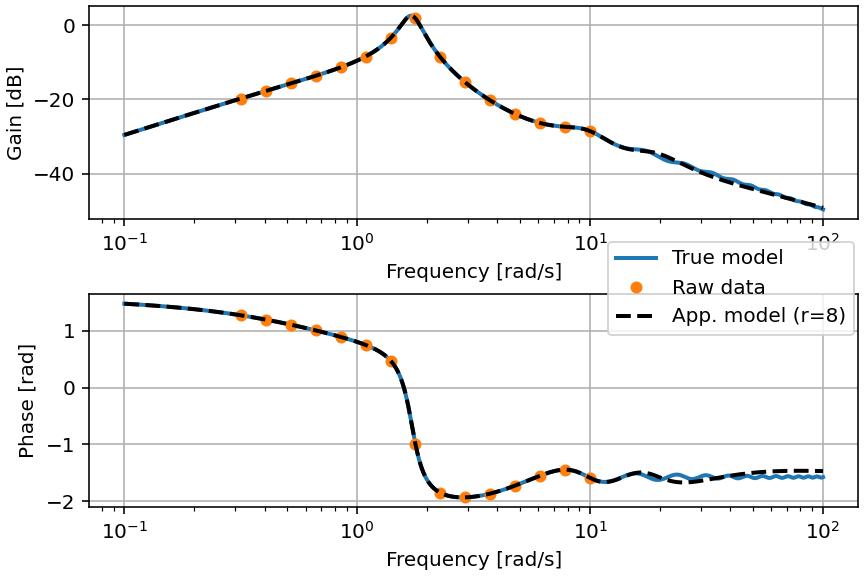
A noter que l'ordre du modèle (i.e. la compléxité) a été choisie automatiquement. Dans notre cas, le nombre de données ont suffit à retrouver le modèle avec une grande précision. Dans la mesure où la fonction initiale est de dimension infinie, la précision machine serait obtenue avec plus de samples, sur une bande de fréquence plus large. Afin de simplifier son analyse, il est également possible de nous focaliser uniquement sur une zone fréquentielle, permettant de simplifier le modèle identifié, en gardant une bonne précision dans l'intervalle d'intérêt. Ici nous cherchons une bonne approximation en basses fréquences. Ceci est particulièrement intéressant pour simuler ou contrôler des sous-ensemble du système ou phénomène.
% Reduce over frequency band range
[A2, B2, C2, D2, E2] = mdspacky.loewner(w, data, wband=[0,2], stable=True)
Hjw2 = mdspacky.ssfr(A2, B2, C2, D2, E2, W)
eigHr2 = linalg.eigvals(A2, E2)
Ici aussi, l'ordre est estimé automatiquement, indiquant un modèle plus simple, et pour autant, précis dans l'intervalle d'intérêt. Le diagramme de Bode du modèle initial et identifié sont donnés dans la figure suivante:
A présent, nous pouvons évaluer simplement les réponses à un échelon relative aux modèles rationnels obtenus. Le calcul de la réponse à un échelon du modèle initial est plus compliqué à obtenir car celui-ci est irrationnel et requiert un calcul dédié.